阿克曼底盘机器人
两轮差速ROS 智能机器人是基于 ROS 框架的移动机器人平台,采用经典两轮差速驱动,通过独立控制左右轮转速实现直行、转向、原地旋转等平面运动。其结构简单、控制直观、成本低且灵活可扩展,是科研、教育及商业原型开发的热门基础平台。
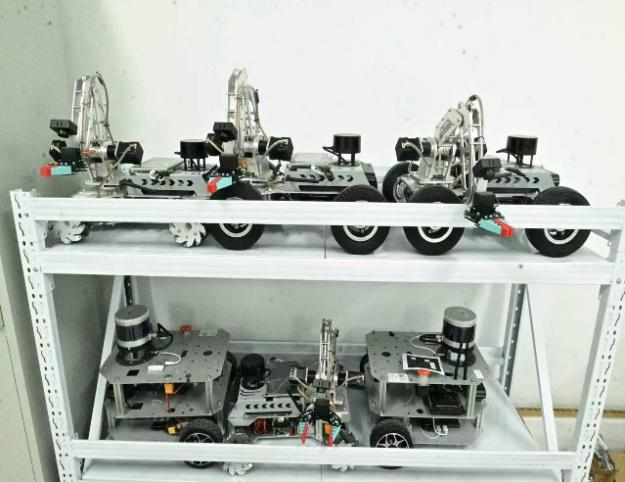
视觉阿克曼底盘机器人,融合经典机械结构与现代智能感知技术,采用汽车工业的阿克曼转向原理,借精妙连杆机构让转弯时内外侧车轮形成角度差,解决传统差动结构在高速、负重场景下的稳定性问题,可灵活搭载传感器、计算单元或机械臂,快速构建场景化方案,不断拓展应用边界,助力智能技术发展。
麦克纳姆底盘机器人
麦克纳姆轮ROS 独立底盘是基于 ROS 框架开发的全向移动机器人平台。其核心优势是靠四个特殊麦克纳姆轮,实现平面内前进、横移、斜向移动及原地旋转,狭窄复杂环境中灵活性极高。
带机械臂的视觉麦克纳姆轮智能小车是集全向移动、环境感知与灵巧操作于一体的高级机器人平台,融合麦克纳姆轮运动、机器视觉识别及多自由度机械臂抓取技术,代表移动操作机器人领域先进水平。
移动复合机器人
移动复合机器人的核心在于”手脚眼脑”的一体化。其移动底盘负责承载和移动,机械臂负责执行抓取、装配等操作任务,视觉系统用于感知环境和识别物体,而智能控制系统则协调所有单元的工作。这类机器人技术的发展,经历了从早期移动机器人与机械臂的简单物理叠加,到如今一套控制系统实现深度融合的演进。这种一体化控制大幅提升了机器人的响应速度、操作精度和系统稳定性,同时降低了成本和操作复杂度。
料箱机器人
料箱机器人是一种集感知、决策、执行于一体的智能物流搬运设备。它专为高效处理料箱类货物而设计,能自主完成识别、抓取、搬运、堆放等一系列操作,是实现“货到人”拣选和仓储物流自动化的核心装备之一。
潜伏顶升机器人
潜伏顶升机器人的核心在于其“潜伏”与“顶升”的作业方式。它通过激光雷达、视觉传感器或二维码等导航方式,自主规划路径并行驶到指定货架或物料车下方。到达后,其顶升机构会抬起负载,将其背负或牵引至目标工位或仓库站点后再放下,从而实现物料的自动流转。